Tres pequeños robots de la NASA que explorarán en equipo la superficie lunar han sido empaquetados y enviados desde el Laboratorio de Propulsión a Chorro de la agencia en el sur de California, completando así la primera etapa de su viaje a la Luna.
Los robots forman parte de una demostración tecnológica denominada CADRE (Cooperative Autonomous Distributed Robotic Exploration), cuyo objetivo es demostrar que un grupo de robots puede colaborar para recopilar datos sin recibir órdenes directas de los controladores de la misión en la Tierra. Utilizarán sus cámaras y radares de penetración en el suelo para enviar imágenes de la superficie y el subsuelo lunares mientras prueban el novedoso software que les permite trabajar juntos de forma autónoma.
Los robots CADRE se lanzarán a la Luna a bordo del IM-3, la tercera entrega lunar de Intuitive Machines, que tiene una ventana de misión que se extiende hasta principios de 2026, como parte de la iniciativa CLPS (Commercial Lunar Payload Services) de la NASA. Una vez instalados en el módulo de aterrizaje Nova-C de Intuitive Machines, se dirigirán a la región de Reiner Gamma, en el extremo occidental de la cara oculta de la Luna, donde los robots, alimentados por energía solar y del tamaño de una maleta, pasarán las horas de luz de un día lunar (el equivalente a unos 14 días en la Tierra) realizando experimentos. El éxito de CADRE podría allanar el camino para posibles misiones futuras con equipos de robots autónomos que apoyen a los astronautas y se distribuyan para realizar mediciones científicas simultáneas y distribuidas.
La construcción del hardware de CADRE -junto con una batería de rigurosas pruebas para demostrar su preparación para el viaje por el espacio- finalizó en febrero de 2024.
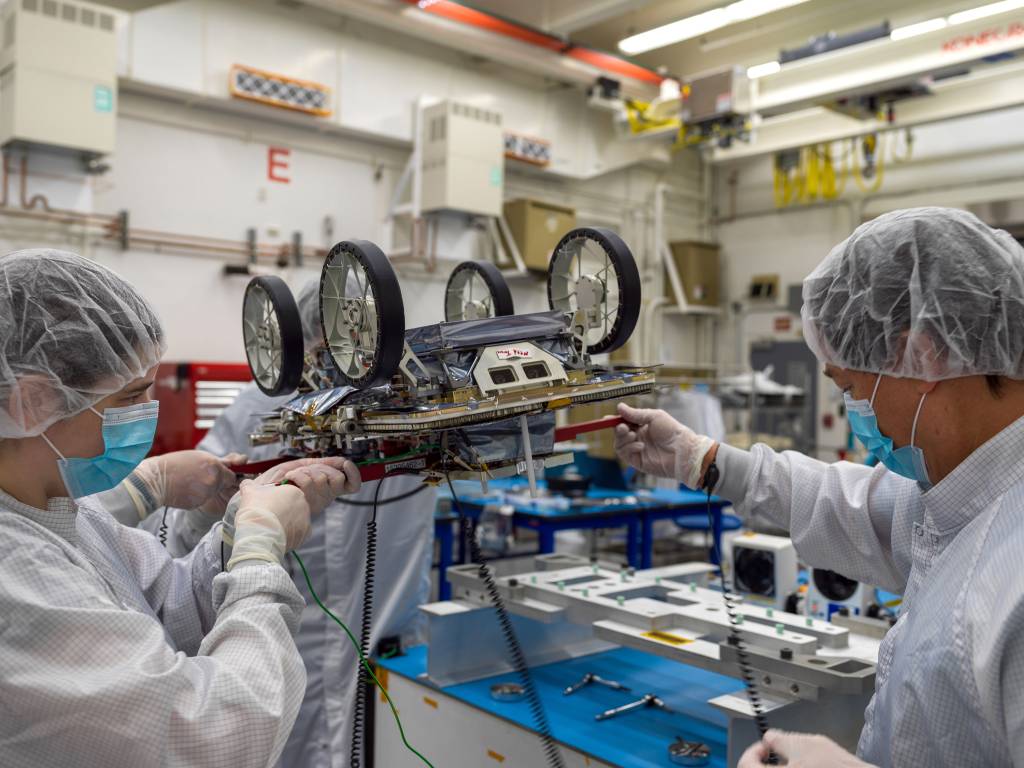
Para preparar el envío a las instalaciones de Intuitive Machines en Houston, se acopló cada vehículo a su sistema de despliegue, que lo bajará mediante un cable desde el módulo de aterrizaje hasta la polvorienta superficie lunar. Los ingenieros dieron la vuelta a cada rover y lo fijaron a una placa de aluminio para garantizar la seguridad del transporte. A continuación, sellaron los rovers en carcasas metálicas protectoras que encajaron perfectamente en contenedores metálicos y cargaron en un camión. Los equipos llegaron sanos y salvos el domingo 9 de febrero.
«Nuestro pequeño equipo ha trabajado increíblemente duro construyendo estos robots y poniéndolos a prueba, y hemos estado esperando ansiosamente el momento en que finalmente los veamos en camino», dijo Coleman Richdale, jefe de operaciones de ensamblaje, pruebas y lanzamiento del equipo en el JPL. «Todos estamos realmente emocionados de dar este siguiente paso en nuestro viaje a la Luna, y no podemos esperar a ver la superficie lunar a través de los ojos de CADRE».
Los rovers, la estación base y un sistema de cámaras que monitorizará los experimentos CADRE en la Luna se integrarán con el módulo de aterrizaje -al igual que otras cargas útiles de la NASA- en la preparación del lanzamiento de la misión IM-3.
Acerca de CADRE
Una división de Caltech en Pasadena, California, JPL gestiona CADRE para el programa Game Changing Development dentro de la Dirección de Misión de Tecnología Espacial de la NASA. La demostración tecnológica fue seleccionada en el marco de la Iniciativa de Innovación en Superficie Lunar de la agencia, que se estableció para acelerar el desarrollo de tecnologías para la presencia sostenida en la superficie lunar. La Dirección de Misiones Científicas de la NASA gestiona la iniciativa CLPS. El Centro de Investigación Glenn de Cleveland y el Centro de Investigación Ames de Silicon Valley (California) colaboraron en el proyecto. Motiv Space Systems diseñó y construyó elementos clave del hardware en sus instalaciones de Pasadena. La Universidad de Clemson, en Carolina del Sur, contribuyó a la investigación en apoyo del proyecto.
NASA/Febrero 11 de 2025